 基于RISC-V芯片Bianbu Robot机器人解决方案
基于RISC-V芯片Bianbu Robot机器人解决方案

AI机器人作为新质生产力的代表,正在蓬勃高速发展。进迭时空基于RISC-V AI CPU K1芯片推出Bianbu Robot机器人解决方案,服务AI机器人等新质生产力的发展。
K1芯片采用CPU与AI同构融合架构,提供2Tops大模型算力,既能高效运行传统CNN模型,又能支持大模型推理。同时,K1芯片集成了一颗小核协处理器,该协处理器可独立运行 RTOS系统,专责管理芯片上的各路电源开关。在实际产品应用中,AI CPU与协处理器各司其职、高效协同,保障系统实现高效、低功耗且稳定的运行。
机器人核心应用场景
随着大模型的快速发展,AI机器人市场也在快速兴起。K1芯片从底层计算架构出发,为AI机器人多样化功能提供完整解决方案,兼容本地大模型与云端大模型计算,形成云端一体协同方案:
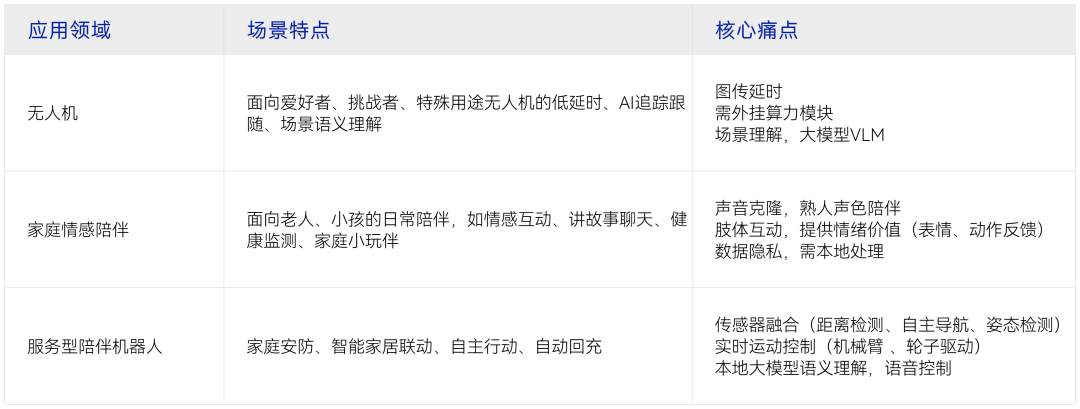
Bianbu Robot机器人整体解决方案,在夯实系统底层能力的基础上,集成了多项功能模块,全面支撑AI机器人产品的快速开发与规模化应用。
方案介绍
Bianbu Robot机器人解决方案搭载K1芯片,有效支持语音识别、视觉感知等关键任务处理。方案集成大语言模型能力,实现自然语言交互与多任务智能编排,广泛适配无人机、清洁机器人、四足机器人、机械臂、AI智能玩具等多类型智能终端的落地应用。
技术方案架构
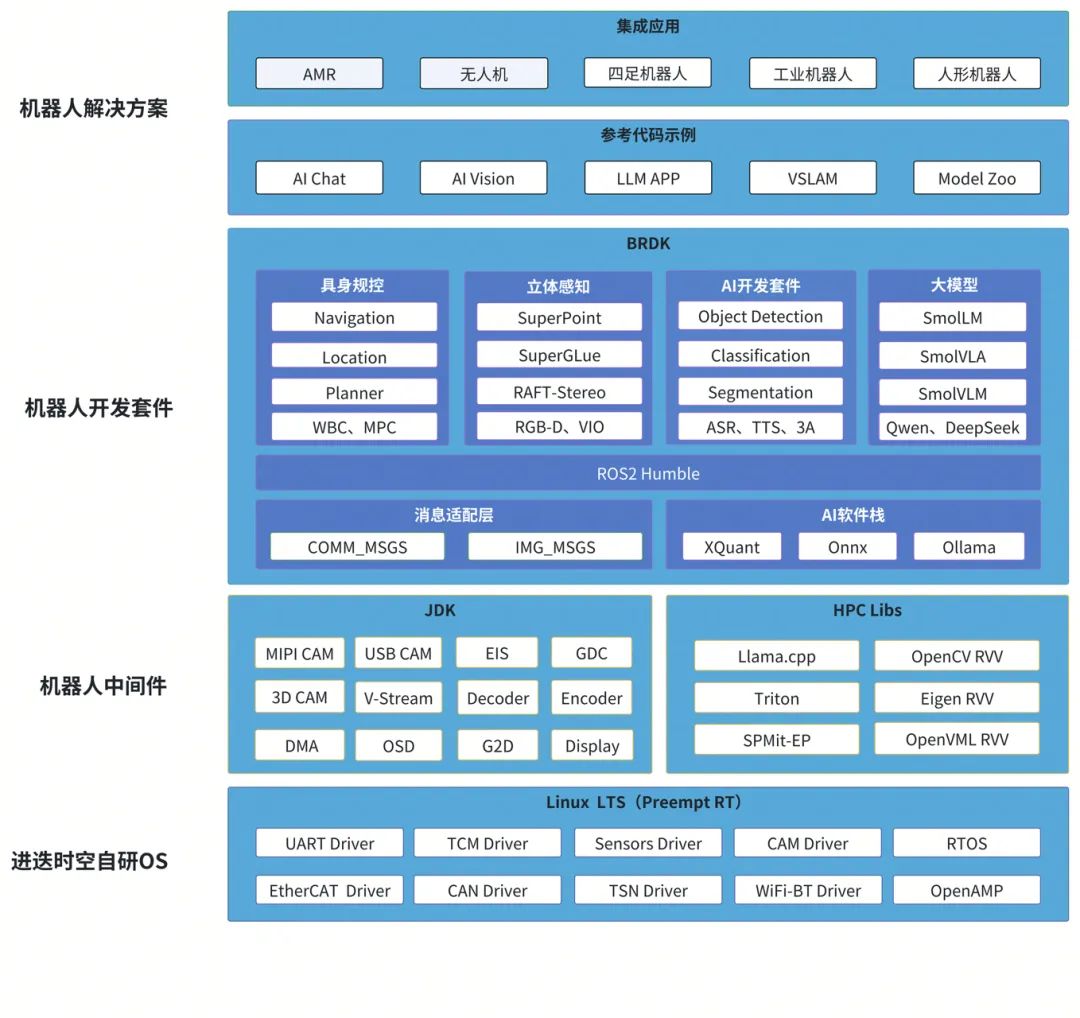
系统方面,Bianbu Robot方案基于Bianbu ROS机器人操作系统,面向AI机器人领域提供完整系统参考。Bianbu ROS以进迭时空自研操作系统Bianbu OS为内核底座,以ROS2为运行核心,集成深度优化的机器人中间件和SDK,涵盖多媒体中间件JDK、高性能计算库HPC Libs和开发套件BRDK。
BRDK(Bianbu ROS Dev Kit)
BRDK基于ROS2系统进行深度抽象与模块化封装,面向AI机器人产品开发高度贴合实际应用的开源参考方案。其核心特性包括:
集成AI开发工具链
内置量化工具链、基础预训练模型库(Model Zoo)及示例代码,支持主流模型格式与部署流程,实现开箱即用的开发体验。
适配主流开源大模型
原生支持DeepSeek、Qwen、Hugging Face Smol*系列等主流开源大模型,集成大模型编排框架 LocalAI,前端调用接口完全兼容 OpenAI API,便于快速对接现有应用生态。
完整语音处理解决方案
提供产品级ASR(语音识别)与TTS(语音合成)模型库,配套多麦克风阵列前处理、声源定位SDK、语音降噪与回声消除模块,覆盖从感知到交互的全链路语音处理。
开源ROS2服务组件
提供丰富的开源ROS2功能包,包括视觉感知、语音交互、传感器接入、具身机械控制、定位导航与LLM任务编排等服务,支持模块化集成与定制化开发。
参考应用Pipeline全链路示例
提供涵盖数据采集、处理、建模与交互的端到端参考流程,助力开发者快速构建完整的机器人应用系统。
JDK(Jobot Dev Kits)
JDK基于基础操作系统,对数据通路进行了高度封装,旨在实现功能模块化与代码高效复用,使开发者专注于构建高层Pipeline,而无需关心底层数据调度与系统细节。其主要特性包括:
IO HUB数据枢纽
兼容多种协议的相机设备,支持数据零拷贝传输,极致压缩系统带宽,显著降低功耗开销。
软硬结合的Pipeline加速
Pipeline流程充分调度芯片内置硬件加速单元,支持图像缩放、旋转、裁剪、混合(blending)等高性能图像处理操作。
功能模块化编程模型
全流程支持模块化“搭积木式”编程,涵盖数据采集、编码压缩、模型推理、图像打水印、视频显示与多路重推流等功能模块,便于灵活组合与快速开发。
低延迟直显机制
提供灵活的视频直显策略,优化帧缓冲路径,显著压缩视频通路延迟,满足高实时性应用需求。
OpenCL加速库支持
集成丰富的图像增强与稳定算法库,包含畸变矫正、电子防抖(EIS)等功能,通过AI CPU加速实现高效图像处理。
HPC Libs(High Performance Libraries)
高性能计算能力在机器人感知与控制任务中至关重要。Bianbu Robot提供优化深度的高性能计算引擎,最大化发挥K1芯片硬件潜力,助力智能系统实现低延迟、高吞吐的推理与计算性能。主要特性包括:
基础计算库
集成多种主流基础计算库,包括机器视觉库OpenCV,基础数学库OpenVML,线性计算库Eigen/OpenBLAS等,基于RISC-V平台做了向量化优化和深度调优,充分发挥256-bit RISC-V Vector Extension(RVV)性能。
AI算子库
基于遵循IME(Intelligent Matrix Engine)标准的自定义AI指令,构建元算子级别的AI算子库。通过调用标准算子API,即可获得澎湃的AI算力。
AI推理加速后端
深度适配RISC-V平台,进行了算子融合,多线程调度,内存优化,SARM动态切分等深度优化,无缝接入ONNXRuntime,Llama.cpp等主流推理生态。
高性能计算语言
基于OpenAI Triton深度适配RISC-V后端,可使用Python编写出接近硬件峰值性能的高效算子。支持将主流CUDA推理任务快速迁移至RISC-V平台,显著降低适配成本,加速落地应用。
方案特点
Bianbu Robot机器人解决方案专注于语音算法、AI视觉与大模型应用,提供开箱即用的模块化服务,紧密结合芯片性能,助力客户加速方案落地。SDK源码开放,支持开发者自由创新。
支持丰富的 Model Zoo
涵盖大模型应用、语音处理及传统视觉AI模型。
大模型应用
兼容Qwen2系列、DeepSeek-1.5b、SomlLM2、SomlVLM、SomlVLA系列,支持大模型语音对话,端到端语音对话延时低于 1.5 秒。
语音处理
涵盖VAD、ASR、TTS、DOA、NS及多麦克风声源定位。
传统 AI 视觉
提供目标检测、分类、追踪等深度优化基础模型,满足1000+应用场景需求。
定位与建图
支持激光导航、单目视觉VSLAM、双目里程计方案。
支持 Linux PreemptRT
兼容工业控制协议EtherCAT、CAN、RS485/232,满足实时控制需求。
低延时视频通路
支持最高1080P@120FPS编码,满足无人机低延时视频需求。
完善配套工具链
包括优化的GCC/Clang编译器、量化工具及大模型微调工具。
方案优势
当前AI机器人多依赖联网,隐私保护成为关键挑战。进迭时空的云端协同方案有效解决了大模型落地的核心难题:
开发灵活性
Linux SDK系统源码全面开放,配备丰富调试工具,便于客户扩展应用与自定义算法开发。
成本优势
K1端侧承担基础AI推理任务,降低对云端算力服务器的依赖,减少系统整体运营成本。
性能平衡
结合端侧轻量推理与云端高算力计算,既保障本地大模型智能升级,又避免纯云端方案带来的高延迟,实现产品随时在线智能响应。
隐私增强
通过本地算力就地处理隐私敏感任务(如语音转文字ASR),符合多国隐私保护法规要求,解决大模型应用的合规难题。
-
芯片
+关注
关注
460文章
52568浏览量
441917 -
机器人
+关注
关注
213文章
29779浏览量
213201 -
RISC-V
+关注
关注
46文章
2597浏览量
48952 -
进迭时空
+关注
关注
0文章
32浏览量
144
发布评论请先 登录
毕超博士:基于RISC-V的机器人电机控制芯片

risc-v多核芯片在AI方面的应用
RISC-V在AI领域的发展前景怎么样?
risc-v芯片在电机领域的应用展望
香蕉派 BPI-CM6 工业级核心板采用进迭时空K1 8核 RISC-V 芯片开发
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第19期:2025.07.7--2025.07.11
智能扫地机器人解决方案
为什么选择RISC-V?
基于RISC-V开放架构的存算一体化芯片解决方案

基于RISC-V内核的嵌入式系统在机器人关节控制中的应用研究
大象机器人×进迭时空联合发布全球首款RISC-V全栈开源小六轴机械臂

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品




 工商网监
工商网监
评论