 JTAG标准的状态机实现
JTAG标准的状态机实现

JTAG标准的状态机实现
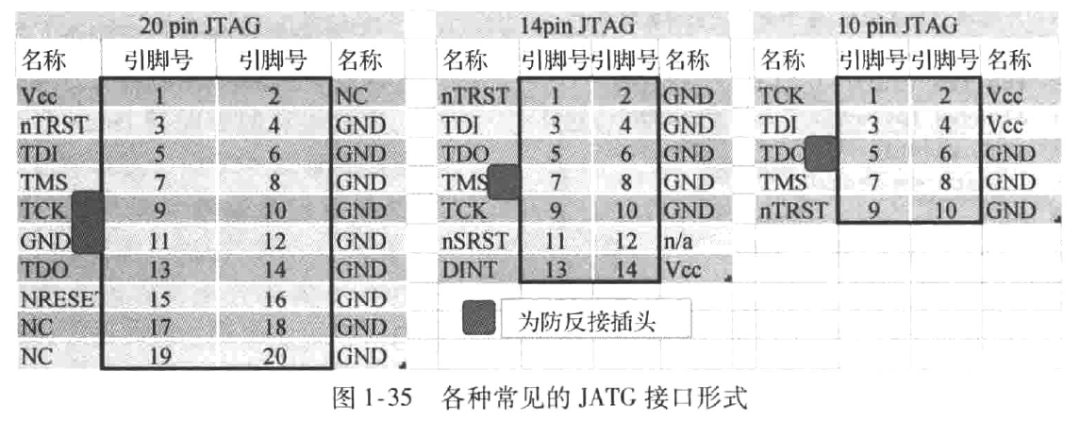
JTAG作为一项国际标准测试协议(IEEE1149.1兼容),主要用于芯片内部测试和调试。目前的主流芯片均支持JTAG协议,如DSP、FPGA、ARM、部分单片机等。标准的JTAG接口是20Pin,但JTAG实际使用的只有4根信号线,再配合电源、地。目前常见的各种接口形式(20pin、14pin、10pin):
JTAG标准介绍
JTAG的基本原理是在器件内部定义一个TAP(Test Access Port)(测试访问口)通过专用的JTAG测试工具对内部节点进行测试。JTAG测试允许多个器件通过JTAG接口串联在一起,形成一个JTAG链,能实现对各个器件分别测试。JTAG引脚的定义如下列表所示:
TCK:TCK在IEEE1149.1标准里是强制要求的。TCK为TAP的操作提供了一个独立的、基本的时钟信号,TAP的所有操作都是通过这个时钟信号来驱动的;
TMS:TMS在IEEE1149.1标准里是强制要求的。TMS信号在TCK的上升沿有效,用来控制TAP状态机的转换。通过TMS信号,可以控制TAP在不同的状态间相互转换;
TDI:TDI在IEEE1149.1标准里是强制要求的。TDI是数据输入的接口,所有要输入到特定寄存器的数据都是通过TDI接口一位一位串行输入的(由TCK驱动);
TDO:TDO在IEEE1149.1标准里是强制要求的。TDO是数据输出的接口,所有要从特定的寄存器中输出的数据都是通过TDO接口一位一位串行输出的(由TCK驱动);
TRST:可选项,TRST可以用来对TAP控制器进行复位(初始化)。因为通过TMS也可以对TAP控制器进行复位(初始化),所以有四线JTAG与五线JTAG之分;
RTCK:可选项,由目标端反馈给仿真器的时钟信号,用来同步TCK信号的产生,不使用时直接接地;
nSRST:可选性与目标板上的系统复位信号相连,可以直接对目标系统复位。同时可以检测目标系统的复位情况,为了防止误触发,应在目标端是哪个加上适当的上拉电阻;
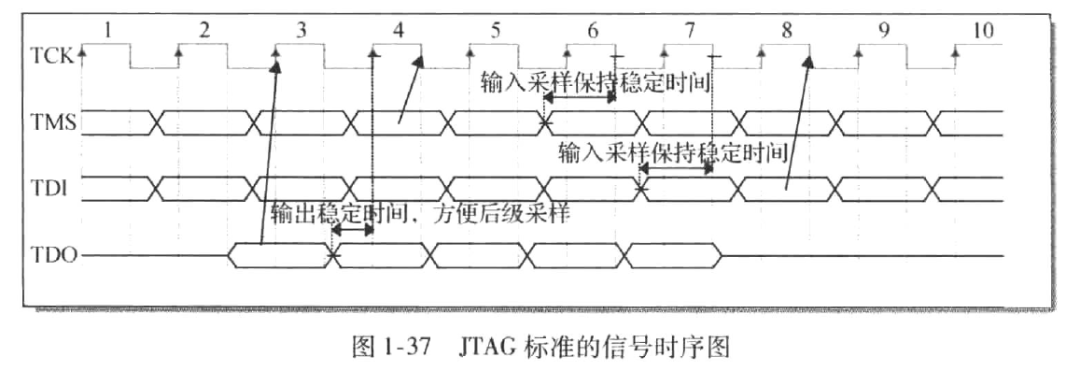
JTAG标准的信号时序如下图所示:
通过JTAG连接,可以完成如下的功能:
对所有串接在一起的IC进行引脚连接性测试,确认PCB是否焊接正常;
对CPU、DSP、FPGA等进行调试;
通过JTAG对FPGA进行编程。
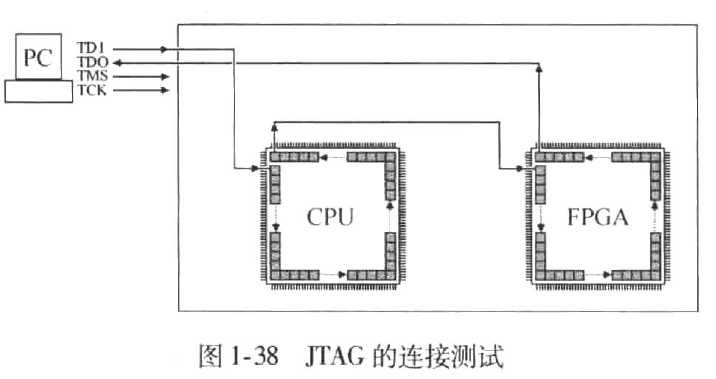
进行引脚连接测试的JTAG用法如下图所示,各个芯片引脚的连通状态可以一次串接通信到PC的TDO引脚中。
按照菊花链方式串接调试的JTAG用法如下图所示,多个串接在一起的CPU和FPGA都能够一起进行调试和测试。
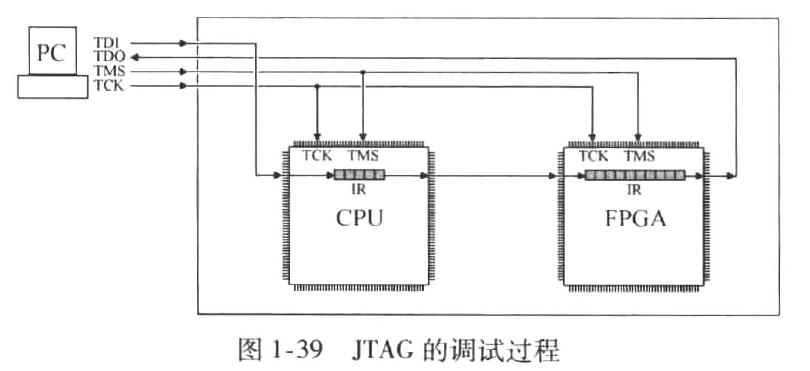
上图可以看出JTAG的调试原理:
所有调试芯片的IR寄存器串接在一起,然后进行串行移位,最后,所有数据都进入到JTAG口的TDO中;PC通过对TDO数据的串并转换,获得每个CPU、DPS或FPGA的内部寄存器状态。
PC将需要写入CPU、DSP或FAPG的数据通过并串转换放置到TDI总线上,最后通过状态移位到规定的CPU寄存器上,最后通过TMS制定生效时刻。
TCK就是TDI和TDO的移位时钟,而TMS则是控制指令。
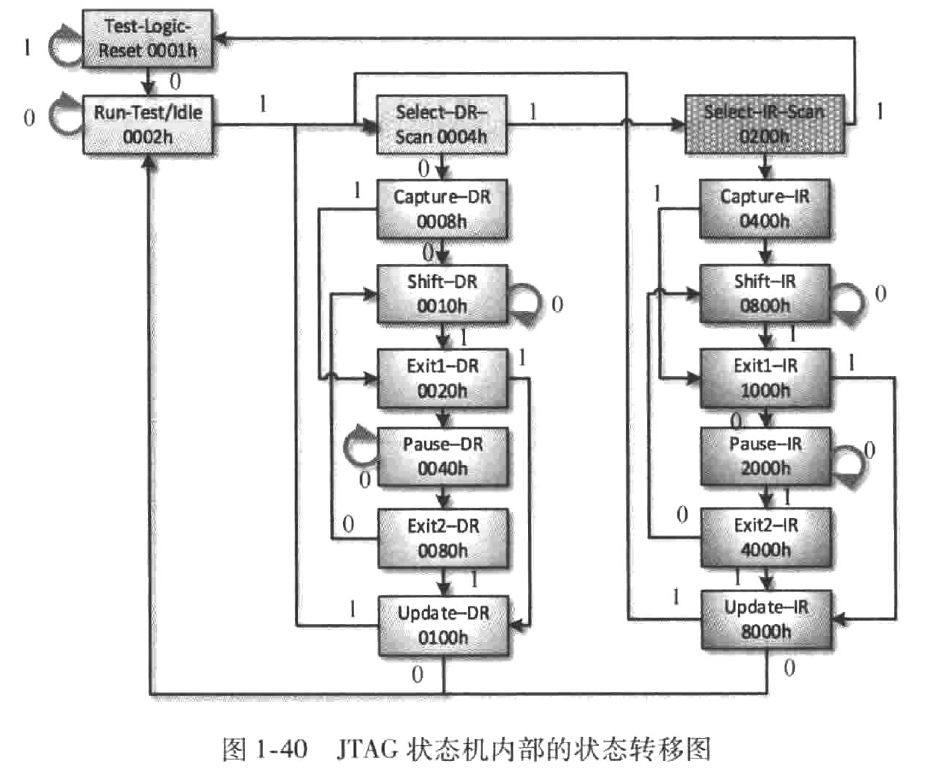
因此,JTAG通过一个标准状态机就能够将CPU/DSP/FPGA的内部状态查明,也能改变内部寄存器内容,这也是一种状态控制原理。在1990年之前,JTAG的状态机基本是由各个厂商自行定义的,但后来出现的IEEE1149.1标准对状态转移过程进行了标准化。在某种意义上讲,JTAG的状态机实现过程是最佳的FSM学习对象。
JTAG状态机设计
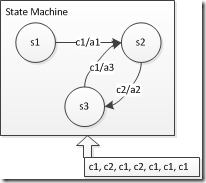
JTAG内部的状态转换图如下图所示,其中的状态值可以由读者自行定义,但推荐采用独热编码或者格雷码进行编码。其中连续的5个TMS为1时,就会回到Test-Logic-Reset状态。
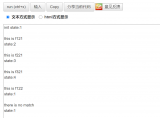
下面的代码是实现JTAG功能的FSM部分,该代码已经应用到多款ASIC芯片中,具有较高的研究价值。
//TAP FSM implementation
module tap_FSM #(parameter sync_mode = 1)(
input tck,
input trst_n,
input tms,
input tdi,
output byp_out,
output updateIR,reset_n,
output reg clockDR, updateDR, clockIR, tdo_en, shiftDR,shiftIR,
output selectIR, sync_capture_en, sync_update_dr, flag,
output [15:0] tap_state
);
//Inter signal declaration
reg [15:0] state;
reg [15:0] next_s;
reg scan_out_a, scan_out_s, updateIR_a;
localparam TEST_LOGIC_RESET = 16'h0001, RUN_TEST_IDLE = 16'h0002, SELECT_DR_SCAN = 16'H0004,
CAPTURE_DR= 16'h0008, SHIFT_DR = 16'h0010, EXIT1_DR = 16'h0020,PAUSE_DR = 16'h0040,
EXIT2_DR = 16'h0080, UPDATE_DR= 16'h0100, SELECT_IR_SCAN = 16'h0200,
CAPTURE_IR= 16'h0400, SHIFT_IR = 16'h0800, EXIT1_IR = 16'h1000,
PAUSE_IR = 16'h2000, EXIT2_IR = 16'h4000, UPDATE_IR= 16'h8000;
assign flag = state[10] || state[11];
wire updateIR_s = state == UPDATE_IR;
assign updateIR = sync_mode ? updateIR_s : updateIR_a;
assign tap_state= state;
always @(posedge tck or negedge trst_n)
if ( !trst_n )
state<=TEST_LOGIC_RESET;
else
state<=next_s;
always @(*)
case(state)
TEST_LOGIC_RESET: if(tms)
next_s=TEST_LOGIC_RESET;
else
next_s=RUN_TEST_IDLE;
RUN_TEST_IDLE: if( tms )
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
SELECT_DR_SCAN: if(tms)
next_s=SELECT_IR_SCAN;
else
next_s=CAPTURE_DR;
CAPTURE_DR: if(tms)
next_s=EXIT1_DR;
else
next_s=SHIFT_DR;
SHIFT_DR: if(tms)
next_s=EXIT1_DR;
else
next_s=SHIFT_DR;
EXIT1_DR: if(tms)
next_s=UPDATE_DR;
else
next_s=PAUSE_DR;
PAUSE_DR: if(tms)
next_s=EXIT2_DR;
else
next_s=PAUSE_DR;
EXIT2_DR: if(tms)
next_s=UPDATE_DR;
else
next_s=SHIFT_DR;
UPDATE_DR: if(tms)
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
SELECT_IR_SCAN:if(tms)
next_s=TEST_LOGIC_RESET;
else
next_s=CAPTURE_IR;
CAPTURE_IR: if(tms)
next_s=EXIT1_IR;
else
next_s=SHIFT_IR;
SHIFT_IR: if(tms)
next_s=EXIT1_IR;
else
next_s=SHIFT_IR;
EXIT1_IR: if(tms)
next_s=UPDATE_IR;
else
next_s=PAUSE_IR;
PAUSE_IR: if(tms)
next_s=EXIT2_IR;
else
next_s=PAUSE_IR;
EXIT2_IR: if(tms)
next_s=UPDATE_IR;
else
next_s=SHIFT_IR;
UPDATE_IR: if(tms)
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
endcase
//FSM outputs
reg rst_n;
//reg clockDR, updateDR, clockIR, tdo_en, rst_n, shiftDR, shiftIR;
//ClockDR/ClockIR - posedge occurs at the posedge of tck
//updateDR/updateIR - posedge occurs at the negedge of tck
always @( tck or state )begin
if ( !tck && ( state == CAPTURE_DR || state == SHIFT_DR ))
clockDR = 0;
else
clockDR = 1;
if ( !tck && ( state == UPDATE_DR ))
updateDR = 1;
else
updateDR = 0;
if ( !tck && ( state == CAPTURE_IR || state == SHIFT_IR ))
clockIR = 0;
else
clockIR = 1;
if ( !tck && ( state == UPDATE_IR ))
updateIR_a = 1;
else
updateIR_a = 0;
end
always @( negedge tck )
if ( state == SHIFT_IR || state == SHIFT_DR )
tdo_en <= 1;
else
tdo_en <= 0;
always @( negedge tck )
if ( state == TEST_LOGIC_RESET )
rst_n <= 0;
else
rst_n <= 1;
always @(negedge tck or negedge trst_n)
if ( !trst_n )
shiftDR <= 0;
else if ( state == SHIFT_DR )
shiftDR <= 1;
else
shiftDR <= 0;
always @(negedge tck or negedge trst_n)
if ( !trst_n )
shiftIR <= 0;
else if ( state == SHIFT_IR )
shiftIR <= 1;
else
shiftIR <= 0;
assign reset_n = rst_n & trst_n;
assign selectIR = state == SHIFT_IR;
assign sync_capture_en = ~(shiftDR | (state == CAPTURE_DR) | (state == SHIFT_DR));
assign sync_update_dr = state == UPDATE_DR;
always @( posedge clockDR )
scan_out_a <= shiftDR & tdi & ~(state == CAPTURE_DR);
wire nxt_st_3 = (state == SELECT_DR_SCAN) & ~tms;
wire nxt_st_4 = ((state == CAPTURE_DR) & ~tms) || ( state == SHIFT_DR & ~tms);
reg sel;
always @(posedge tck or negedge trst_n)
if(!trst_n )
sel <= 0;
else
sel <= ~(nxt_st_3 | nxt_st_4);
wire scan_out = sel ? scan_out_s : shiftDR & tdi;
always @(posedge tck )
scan_out_s <= scan_out & ~(state == CAPTURE_DR);
assign byp_out = sync_mode ? scan_out_s : scan_out_a;
endmodule
对于上述代码,还有一种非常简洁的描述,同样是三段式描述风格,但最重要的组合电路部分可通过手工推导,直接将always描述的组合电路化简为最小逻辑实现代码。
module vjtag (
input clk, // Internal clock
input tdo_mux,// TDO before the negative edge flop
input bypass, // JTAG instruction=BYPASS
input tck, // clock input
input trst_n, // optional async reset active low
input tms, // Test Mode Select
input tdi, // Test Data In
output reg tdo, // Test Data Out
output reg tdo_enb,//Test Data Out tristate enable
output tdi_r1, // TDI flopped on TCK.
output tck_rise, // tck rate clock enable
output captureDR,// JTAG state=CAPTURE_DR
output shiftDR, // JTAG state=SHIFT_DR
output updateDR, // JTAG state=UPDATE_DR
output captureIR,// JTAG state=CAPTURE_IR
output shiftIR, // JTAG state=SHIFT_IR
output updateIR
);
reg tck_r1,tck_r2,tck_r3;
reg tdi_f_local; // local version
wire tdo_enb_nxt; // D input to TDO_ENB flop
wire tdo_nxt; // D input to TDO flop
wire itck_rise;
wire tck_fall;
reg [3:0] state; // current state
wire a,b,c,d,a_nxt,b_nxt,c_nxt,d_nxt;
assign a = state[0];
assign b = state[1];
assign c = state[2];
assign d = state[3];
assign a_nxt=(~tms & ~c & a) |(tms & ~b)|(tms & ~a)|(tms & d & c);
assign b_nxt=(~tms & b & ~a) |(~tms & ~c)|(~tms & ~d & b)|(~tms & ~d & ~a)|(tms & c & ~b)|(tms & d & c & a);
assign c_nxt=(c & ~b)|(c & a)|(tms & ~b);
assign d_nxt=(d & ~c)|(d & b)|(~tms & c & ~b)|(~d & c & ~b & ~a);
assign tdo_enb_nxt = state == 4'b0010 | state == 4'b1010 ? 1'b1 : 1'b0;
assign captureIR = state == 4'b1110 ? 1'b1 : 1'b0;
assign shiftIR = state == 4'b1010 ? 1'b1 : 1'b0;
assign updateIR = state == 4'b1101 ? 1'b1 : 1'b0;
assign captureDR = state == 4'b0110 ? 1'b1 : 1'b0;
assign shiftDR = state == 4'b0010 ? 1'b1 : 1'b0;
assign updateDR = state == 4'b0101 ? 1'b1 :1'b0;
assign tdo_nxt = bypass == 1'b1 & state == 4'b0010 ? tdi_f_local : tdo_mux;
assign tdi_r1 = tdi_f_local;
always @(posedge clk) begin : rtck_proc
tck_r3 <= tck_r2;
tck_r2 <= tck_r1;//synchronizers for edge detection
tck_r1 <= tck;
end
assign tck_rise = itck_rise;
assign itck_rise = tck_r2 & ~tck_r3;
assign tck_fall = ~tck_r2 & tck_r3;
always @(posedge clk)
if (trst_n == 1'b0)
state <= 4'b1111;
else if (itck_rise == 1'b1)begin
state <= {d_nxt, c_nxt, b_nxt, a_nxt};
end
always @(posedge clk)
if (trst_n == 1'b0)
tdi_f_local <= 1'b0;
else if (itck_rise == 1'b1 ) begin
tdi_f_local <= tdi;
end
always @(posedge clk)
if (trst_n == 1'b0)begin
tdo <= 1'b0;
tdo_enb <= 1'b0;
end
else if (tck_fall == 1'b1 ) begin
tdo <= tdo_nxt;
tdo_enb <= tdo_enb_nxt;
end
endmodule // module vjtag
JTAG接口除了标准的4信号引脚外,TI还定义了一种叫做SBW-JTAG的接口,仅用两根引脚(SBWTCK、SBWTDIO)即可实现JTAG功能,通常用于引脚受限的芯片上。ARM的Cortex-M系列CPU均包含SW-JTAG定义标准。
原文链接:
https://blog.csdn.net/sinat_31206523/article/details/115495041
-
接口
+关注
关注
33文章
9122浏览量
154410 -
JTAG
+关注
关注
6文章
405浏览量
73659 -
引脚
+关注
关注
16文章
1857浏览量
53572 -
状态机
+关注
关注
2文章
495浏览量
28405
原文标题:JTAG标准的状态机实现
文章出处:【微信号:gh_9d70b445f494,微信公众号:FPGA设计论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Spring状态机的实现原理和使用方法
玩转Spring状态机

利用74LS161实现复杂状态机

使用函数指针的方法实现状态机

状态模式(状态机)

状态机要实现哪些内容
如何在FPGA中实现状态机



 工商网监
工商网监
评论